概述
本章STM32CUBEMX配置STM32F103,并且在GD32F303中进行开发,同时通过开发板内进行验证。 本章STM32CUBEMX配置STM32F103输出PWM,同时使用TIM测量PWM频率和正占空比。 最近在弄ST和GD的课程 。
样品申请
https://www.wjx.top/vm/mB2IKus.aspx
生成例程
这里准备了自己绘制的开发板进行验证。
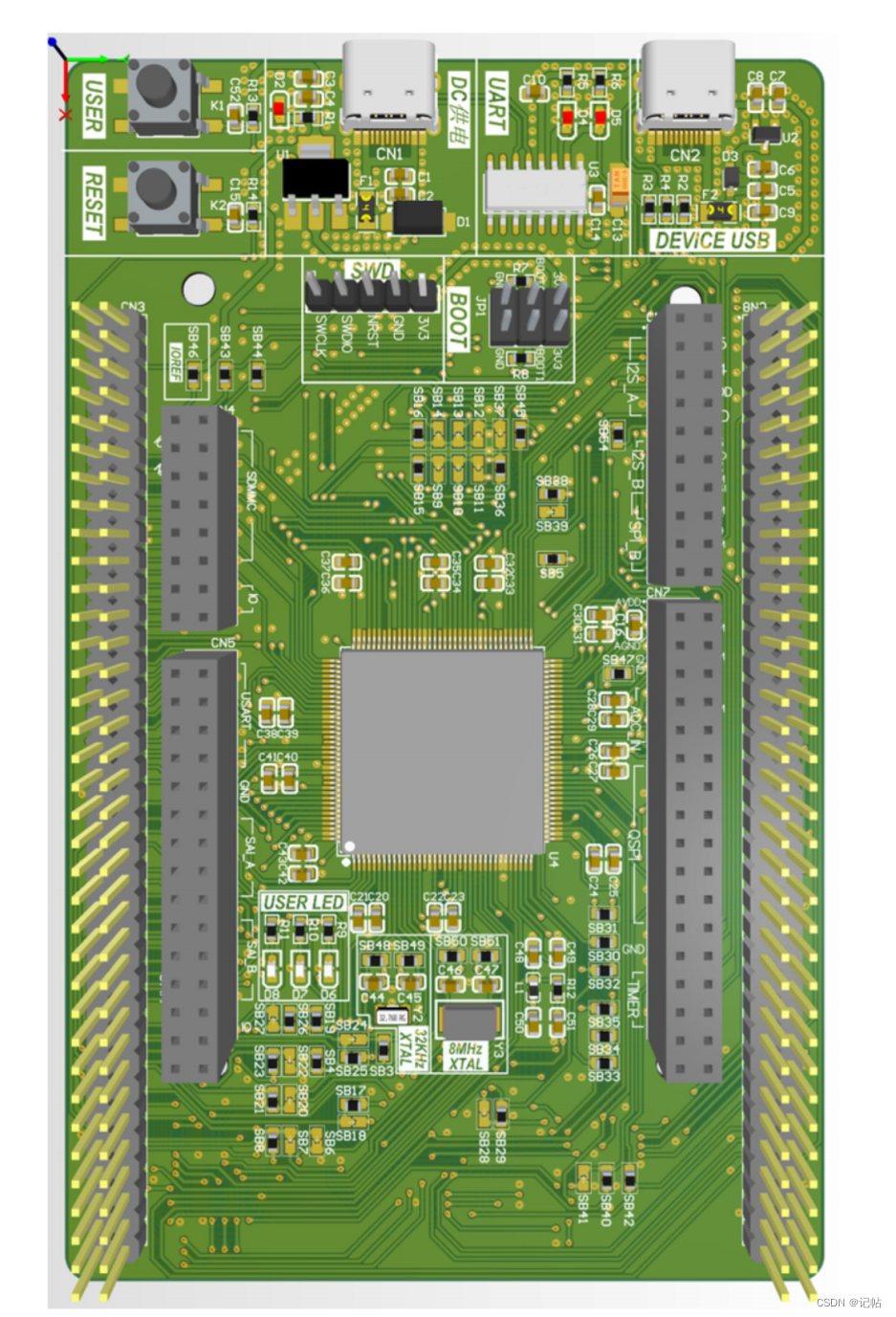
查看原理图,PA9和PA10设置为开发板的串口。
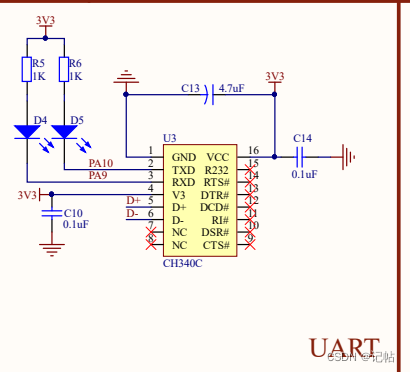
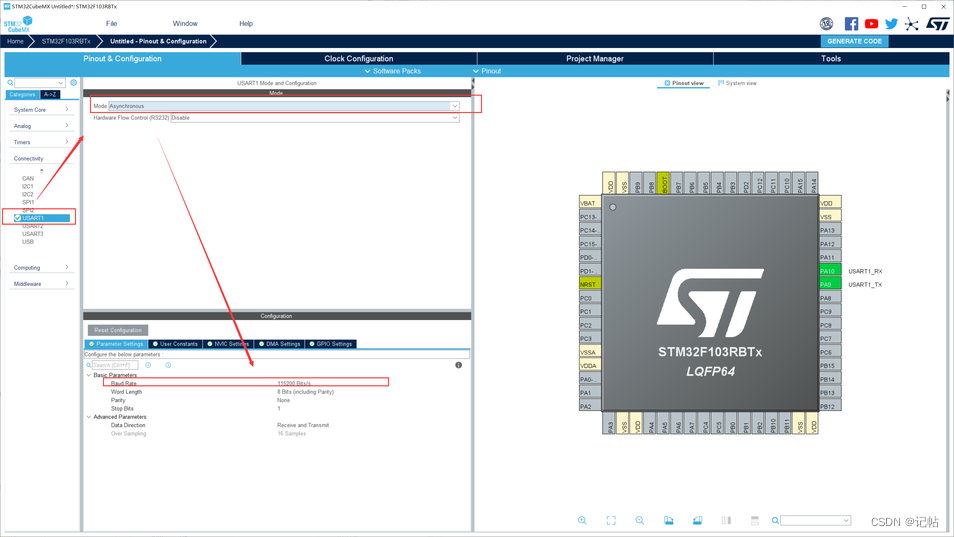
配置串口
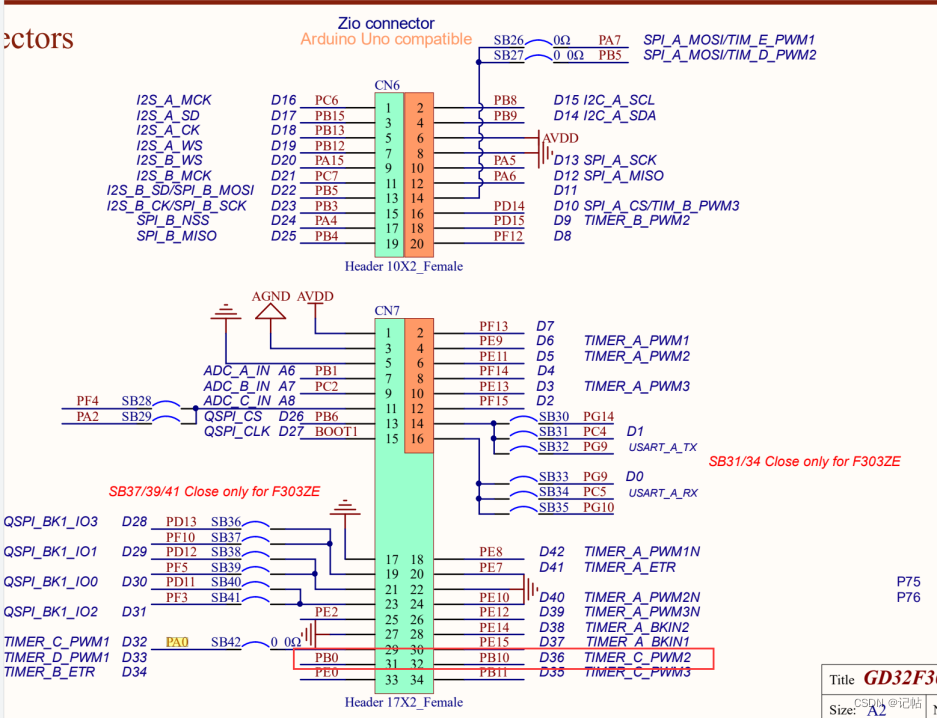
查看原理图,PB0设置为PWM输出管脚,PB10设置为定时器输入捕获管脚。
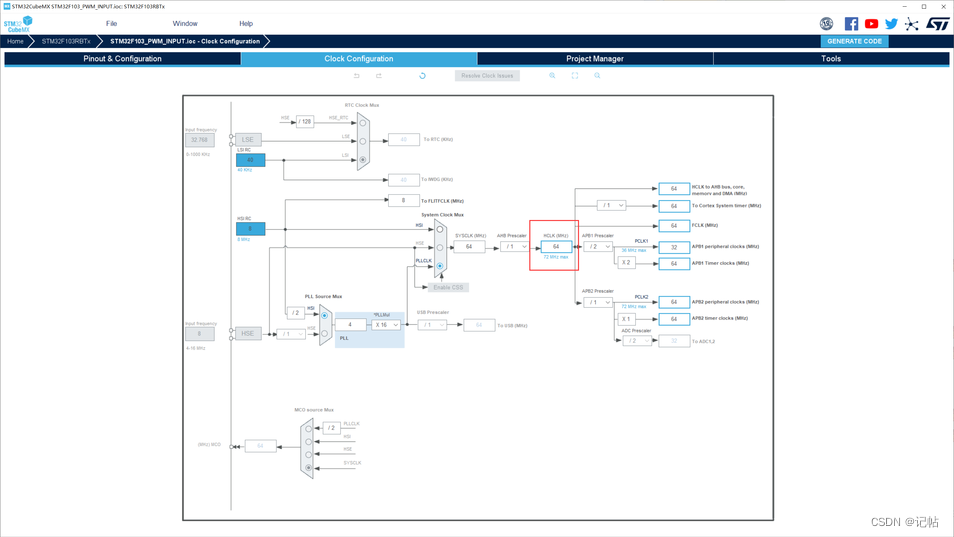
配置时钟树
配置时钟为64M。
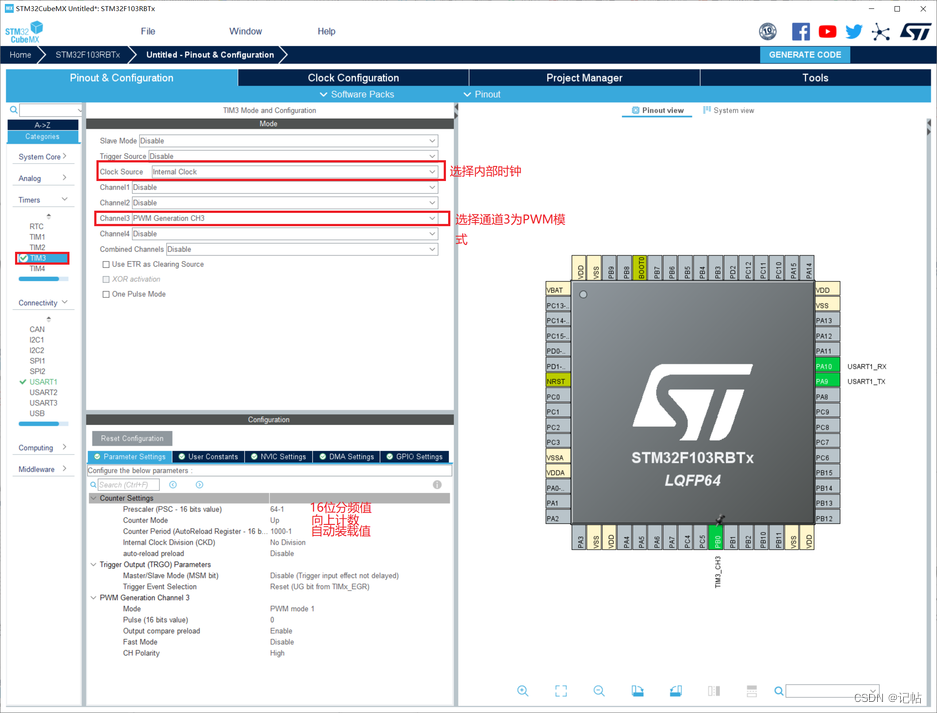
配置PWM
配置定时器1输出pwm的频率为1K。

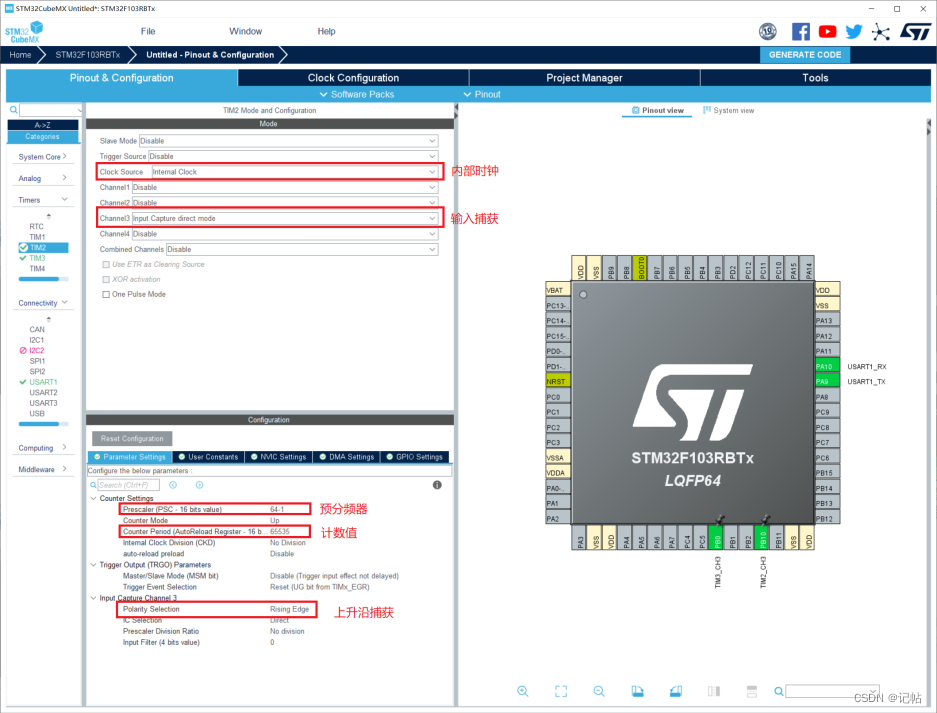
配置输入捕获
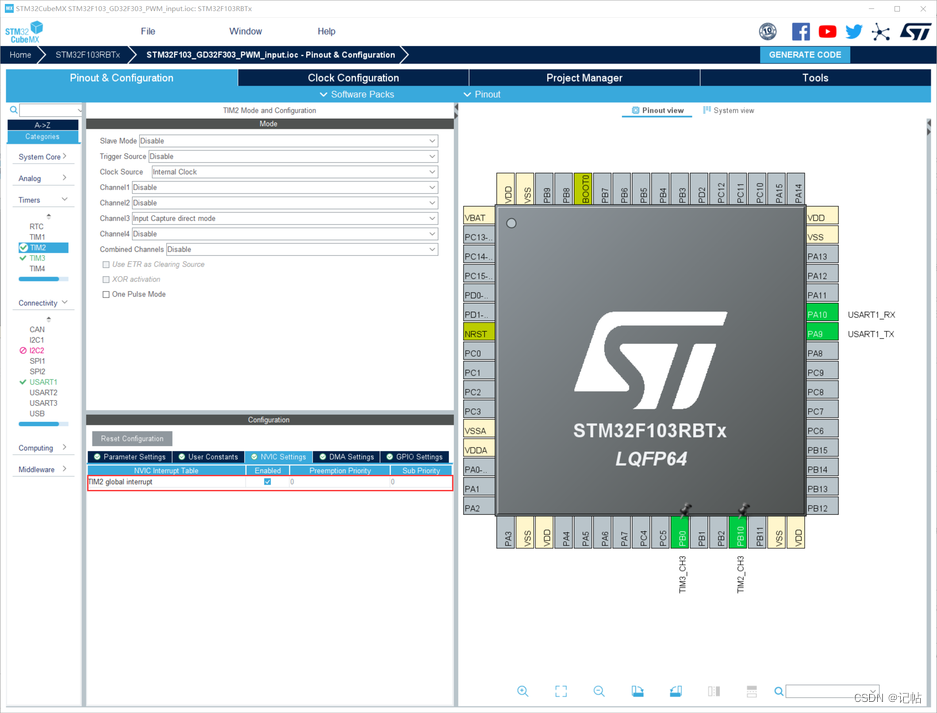
开启中断
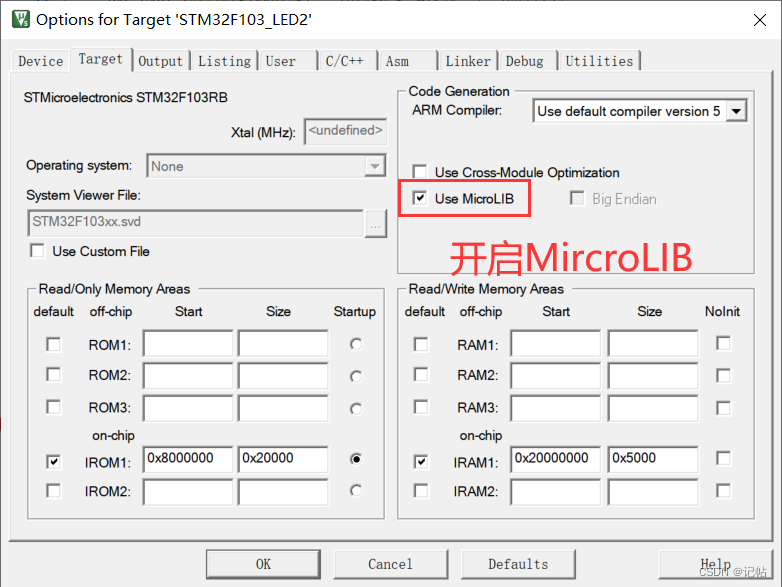
keil配置
microlib 进行了高度优化以使代码变得很小。 它的功能比缺省 C 库少,并且根本不具备某些 ISO C 特性。 某些库函数的运行速度也比较慢,如果要使用printf(),必须开启。
代码
在main.c中,添加头文件,若不添加会出现 identifier “FILE” is undefined报错。
复制
/* USER CODE BEGIN Includes */
#include “stdio.h”
/* USER CODE END Includes */
函数声明和串口重定向:
复制
/* USER CODE BEGIN PFP */
int fputc(int ch, FILE *f){
HAL_UART_Transmit(&huart1 , (
uint8_t *)&ch,
1,
0xFFFF);
return ch;
}
/*
/* USER CODE END PFP */
空比与频率计算
占空比=(t1-t0)/(t2-t0) 频率=(t2-t0)/时钟频率= =(t2-t0)/(64M/(psc+1))
周期需要2个上升沿去判断,设定第一个上升沿time_flag由0->1,下降沿time_dowm_flag由0->1,此时就知道正占空比时间,当在产生上升沿时候,就可以计算出周期使用的时间。

变量定义
复制
#define IR_IN1 HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_10)
uint8_t time_up_flag=
0;
//上升沿标志位
uint8_t time_dowm_flag=
0;
//下降沿标志位
uint32_t time_up_num=
0;
//上升沿计数
uint32_t time_dowm_num=
0;
//下降沿计数
float time_frequency;
//频率
float time_duty;
//占空比
设置PWM占空比以及开启输入捕获
复制
/* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_3);
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_3,
300);
HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_3);
//函数用于使能定时器某一通道的输入捕获功能,并使能相应的中断
HAL_Delay(
1);
//加个延时,否则会配置错误
__HAL_TIM_SET_CAPTUREPOLARITY(&htim2, TIM_CHANNEL_3, TIM_INPUTCHANNELPOLARITY_RISING);
// 重新设置位上升沿捕获
HAL_Delay(
100);
/* USER CODE END 2 */
回调函数
复制
/* USER CODE BEGIN 4 */
// 捕获中断回调函数,每次捕获到信号就会进入这个回调函数
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
// 判断是否是定时器1的外部捕获口2
if(htim->Instance == TIM2)
{
if(IR_IN1&&time_up_flag==
0)
//第一次上升
{
time_up_flag=
1;
__HAL_TIM_SET_CAPTUREPOLARITY(&htim2, TIM_CHANNEL_3, TIM_INPUTCHANNELPOLARITY_FALLING);
// 改变捕获极性为下降沿捕获
__HAL_TIM_SET_COUNTER(&htim2,
0);
// 计数清零,从头开始计
}
else if(IR_IN1==
0&&time_dowm_flag==
0)
//下降
{
time_dowm_num = HAL_TIM_ReadCapturedValue(htim,TIM_CHANNEL_3);
// 读取捕获计数,这个时间即为上升沿持续的时间
__HAL_TIM_SET_CAPTUREPOLARITY(&htim2, TIM_CHANNEL_3, TIM_INPUTCHANNELPOLARITY_RISING);
// 改变捕获极性为上升沿沿捕获
time_dowm_flag=
1;
}
else if(IR_IN1&&time_dowm_flag==
1)
//第二次之后上升
{
time_up_num = HAL_TIM_ReadCapturedValue(htim,TIM_CHANNEL_3);
// 读取捕获计数,这个时间即为上升沿持续的时间
__HAL_TIM_SET_CAPTUREPOLARITY(&htim2, TIM_CHANNEL_3, TIM_INPUTCHANNELPOLARITY_FALLING);
// 改变捕获极性为下降沿捕获
time_dowm_flag=
0;
__HAL_TIM_SET_COUNTER(&htim2,
0);
// 计数清零,从头开始计
}
}
}
/* USER CODE END 4 */
主函数
复制
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (
1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
time_frequency=
1000000/time_up_num;
//频率
time_duty = (
float)time_dowm_num/(
float)time_up_num;
//占空比
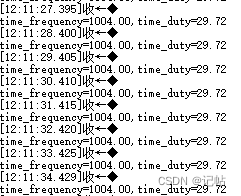
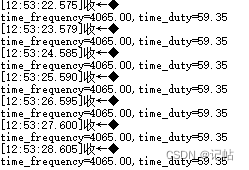
printf(
”
time_frequency=%.2f,time_duty=%.2f”,time_frequency,time_duty*
100);
time_duty=
0;
time_frequency=
0;
__HAL_TIM_SET_AUTORELOAD(&htim3,
500–
1);
__HAL_TIM_SET_PRESCALER(&htim3,
32–
1);
HAL_Delay(
1000);
}
/* USER CODE END 3 */
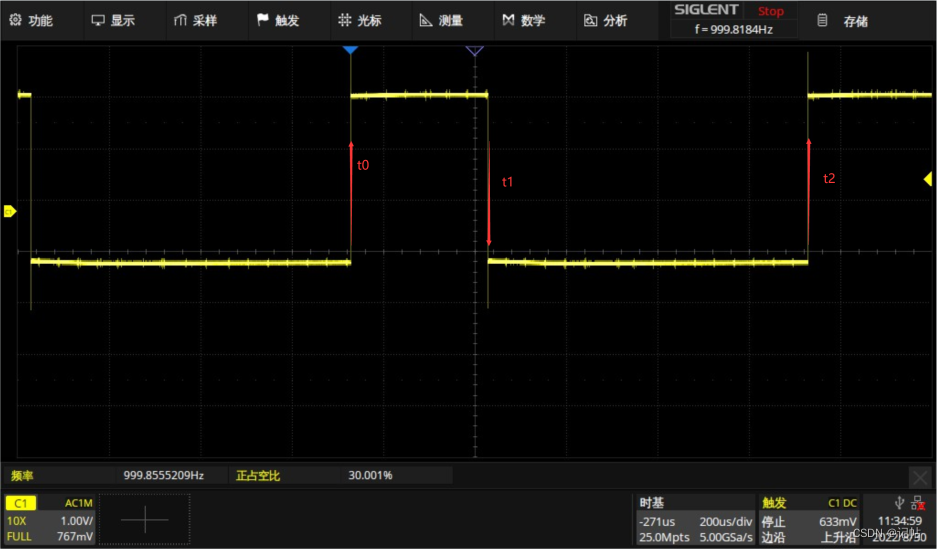
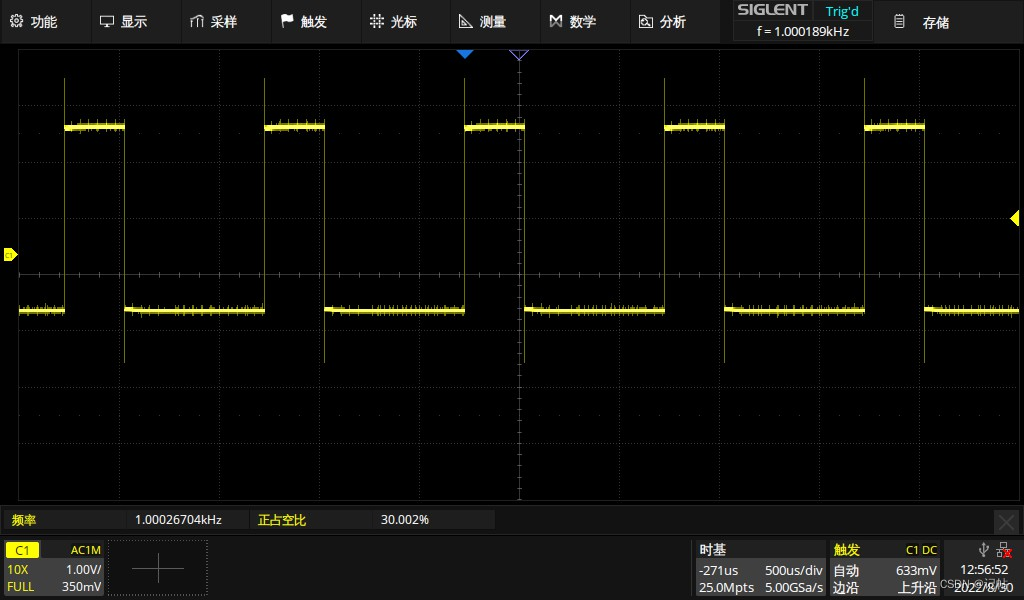
测试结果
当输出1k频率,30%正占空比。
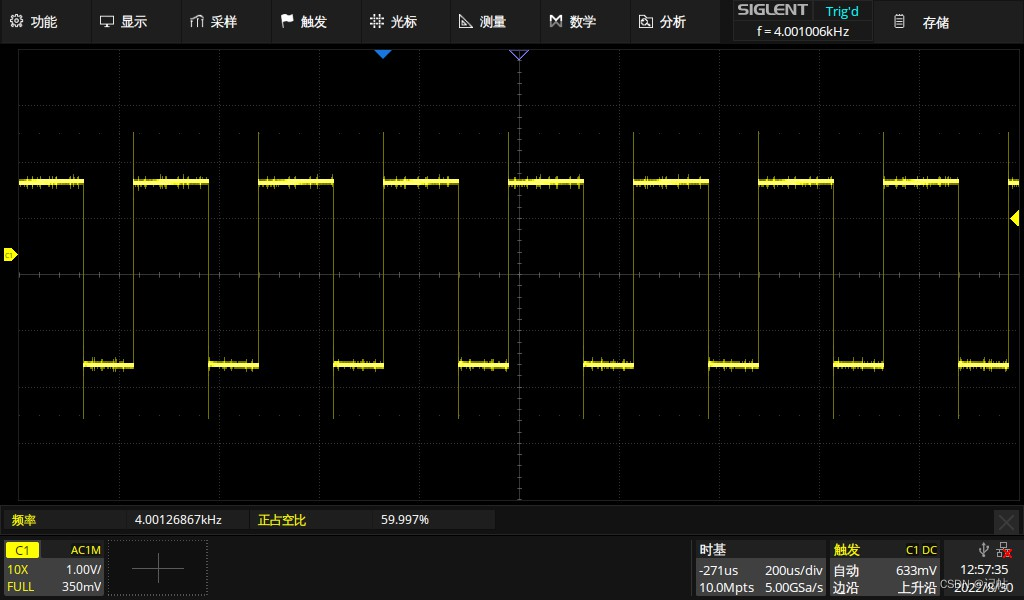
当输出4k频率,60%正占空比。
审核编辑 黄昊宇

