2 添加一个kinect模型
虽然我们使用了一个深度相机,但是该教程中我们并没有使用深度话题,仅仅使用了RGB图像。<xacro:property name=”deg_to_rad” value=”0.01745329251994329577″/><!– kinect –><joint name=”kinect_joint” type=”fixed”><origin xyz=”0.1 0 0.8″ rpy=”0 ${75.0 * deg_to_rad} 0″/><parent link=”base_link”/><child link=”kinect_link”/></joint><xacro:kinect_camera prefix=”kinect”/>
最终效果如图所示: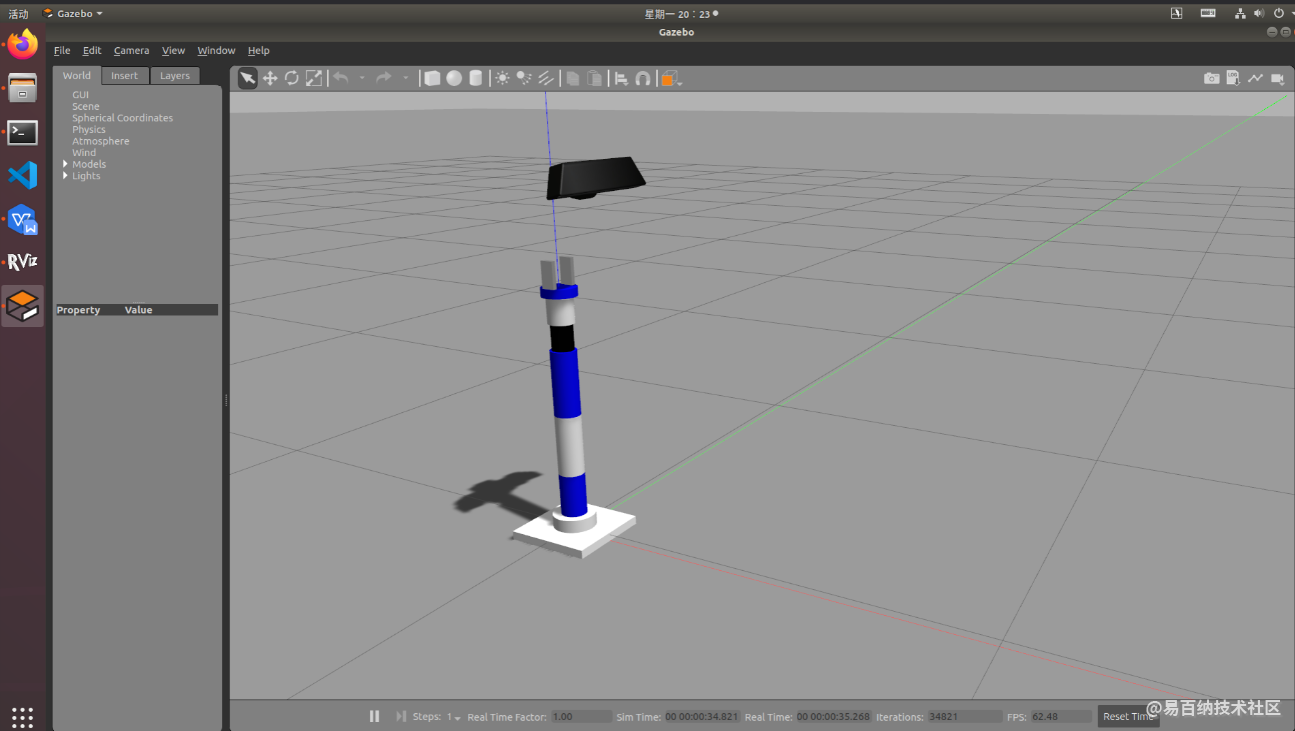
 3 配置二维码识别包
3 配置二维码识别包
需要使用ros的ar_track_alvar包。
首先安装:sudo apt-get install ros-melodic-ar-track-alvar //替换成自己的ROS版本
之后,创建一个launch文件配置ar_track_alvar节点的内部参数:<launch><arg name=”marker_size” default=”9″/><arg name=”max_new_marker_error” default=”0.08″/><arg name=”max_track_error” default=”0.2″/><arg name=”cam_image_topic” default=”/kinect/rgb/image_raw”/><arg name=”cam_info_topic” default=”/kinect/rgb/camera_info”/><arg name=”output_frame” default=”/base_link”/><node name=”ar_track_alvar” pkg=”ar_track_alvar” type=”individualMarkersNoKinect” respawn=”false” output=”screen”><param name=”marker_size” type=”double” value=”$(arg marker_size)”/><param name=”max_new_marker_error” type=”double” value=”$(arg max_new_marker_error)”/><param name=”max_track_error” type=”double” value=”$(arg max_track_error)”/><param name=”output_frame” type=”string” value=”$(arg output_frame)”/><remap from=”camera_image” to=”$(arg cam_image_topic)”/><remap from=”camera_info” to=”$(arg cam_info_topic)”/></node></launch>
<
注意:marker_size是二维码的大小,单位是cm,还需要修改launch文件中的相机话题部分,其中out_frame是输出二维码pose时候参考的坐标系,这里参考的是base_link。
运行launch文件效果如下,可以看到在rviz中,已经检测到了二维码。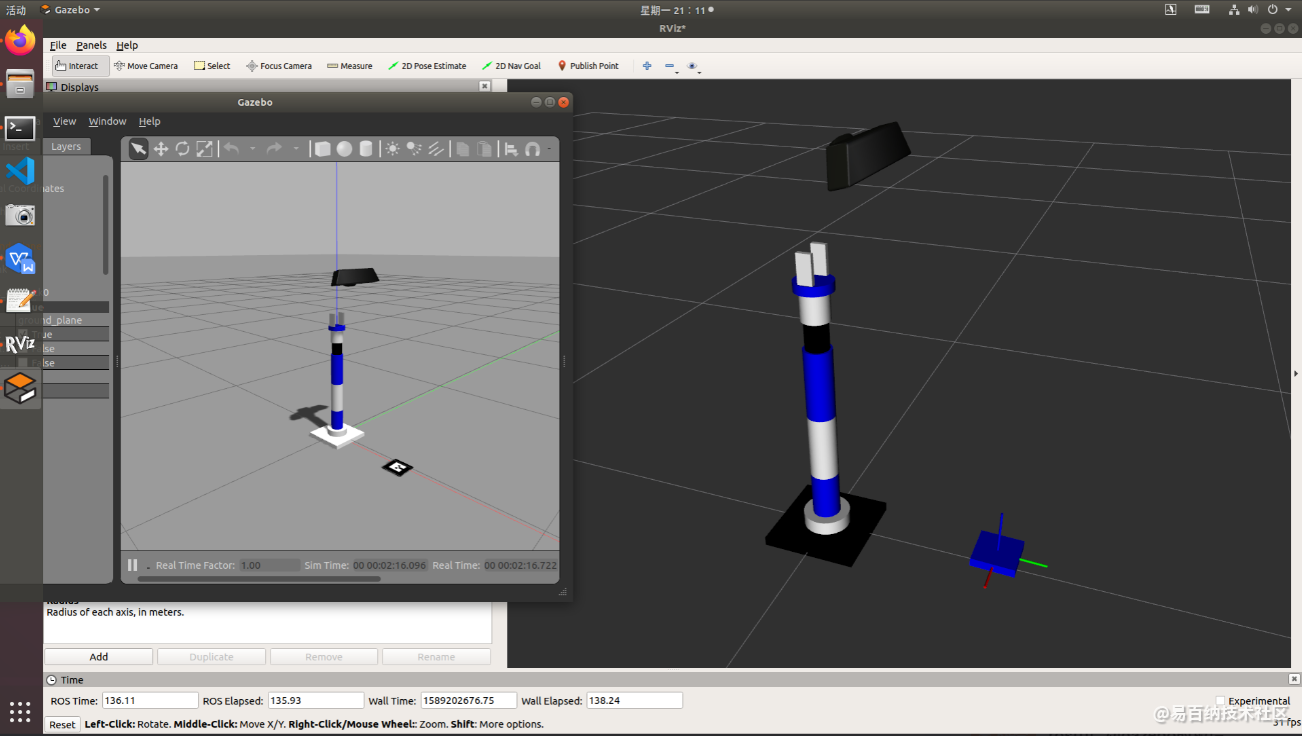 查看pose的话题消息: rostopic echo /ar_pose_marker
查看pose的话题消息: rostopic echo /ar_pose_marker
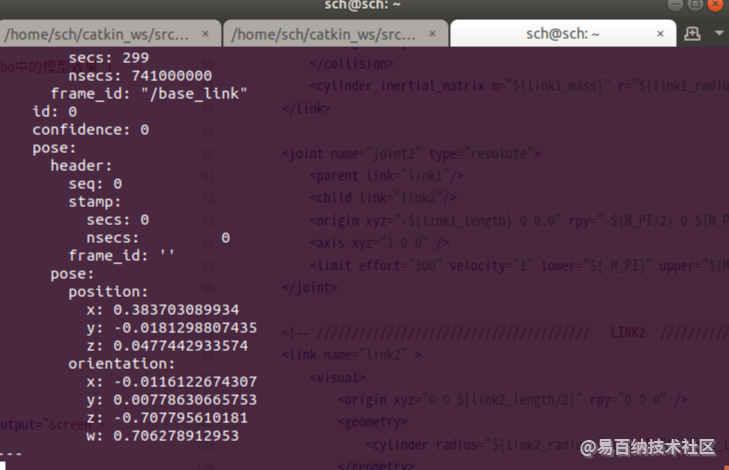 数据包含了三维坐标值和四元数。
数据包含了三维坐标值和四元数。
免责声明:文章内容来自互联网,本站不对其真实性负责,也不承担任何法律责任,如有侵权等情况,请与本站联系删除。
转载请注明出处:ROS机械臂控制之跟踪二维码-ros机械臂抓取 https://www.yhzz.com.cn/a/8683.html